Autonomous Infinite Range Boat “Gumption Trap”
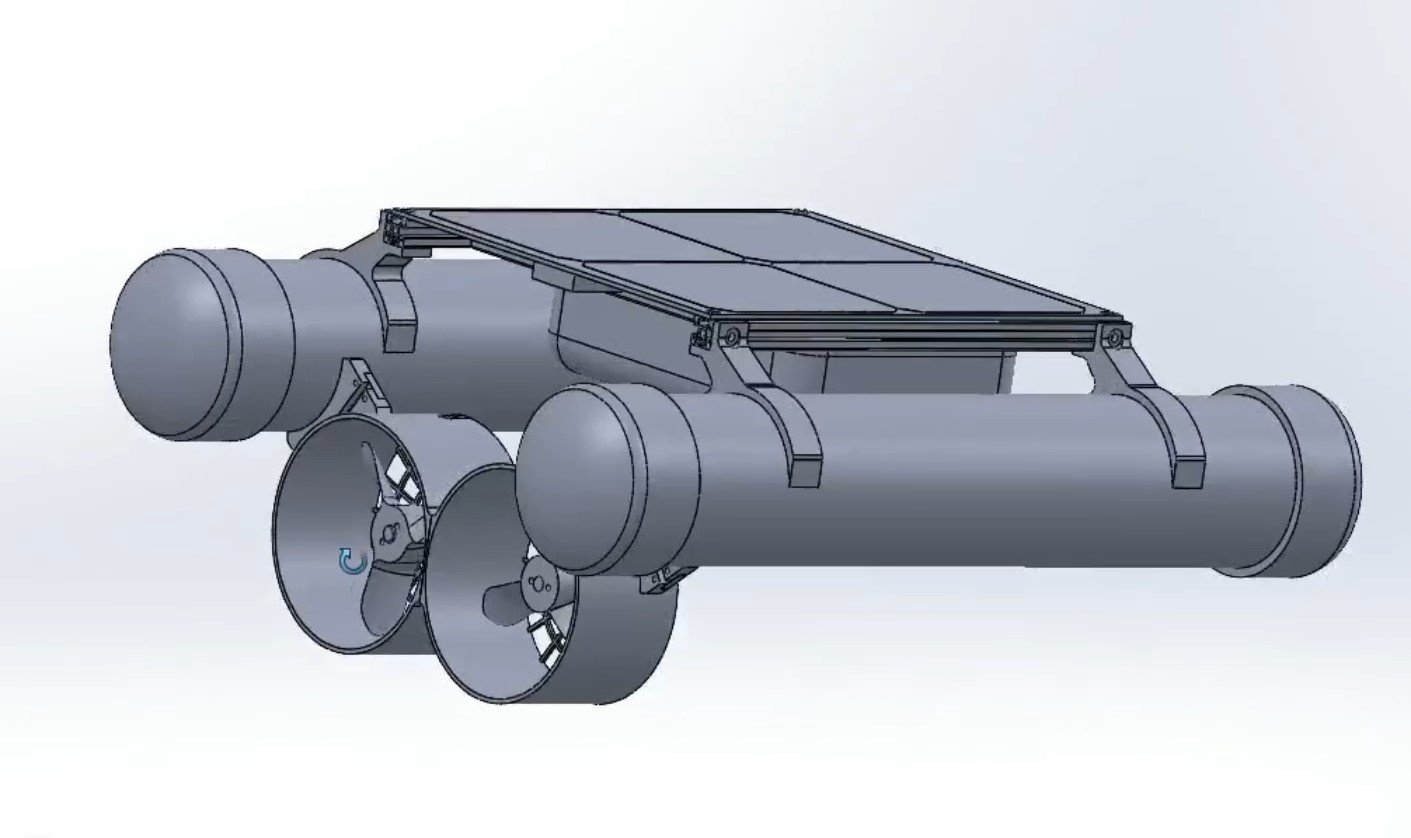
I created this self driving drone ship to autonomously navigate through a predetermined series of waypoints using magnetometry and GPS. It’s powered by a 50W solar panel, consuming around 40W of power at full throttle. Its battery, charged by excess solar energy, can power the vehicle for around 40 minutes during gaps in solar access.
I plan to implement data logging of voltage and current draw to analyze the efficiency of various propellers, as well as to serve as a “black box” to diagnose failures. I also plan to install a sonar depth finding sensor to use this vehicle to autonomously plot a 3 dimensional depth map of small lakes and ponds.
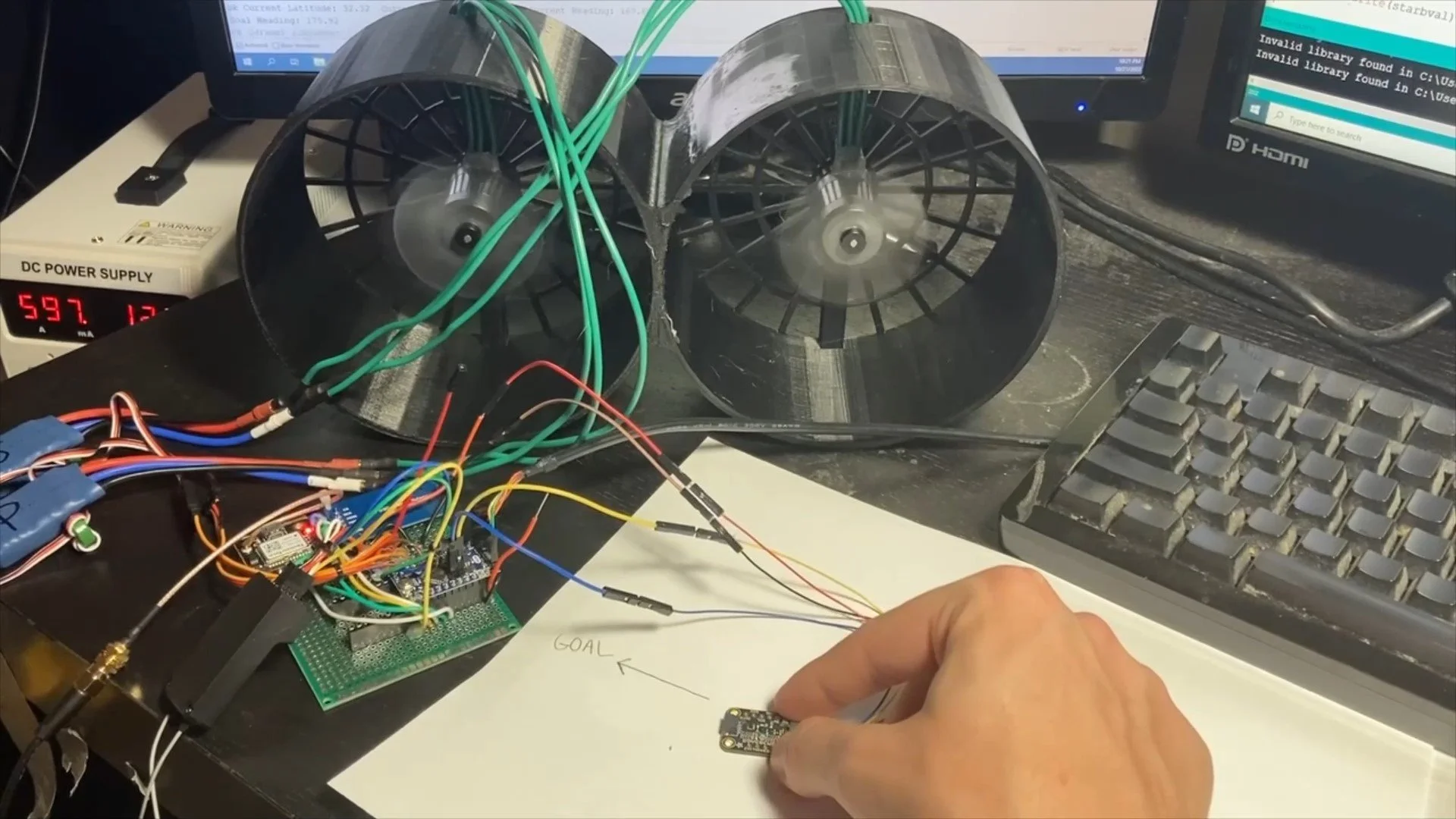
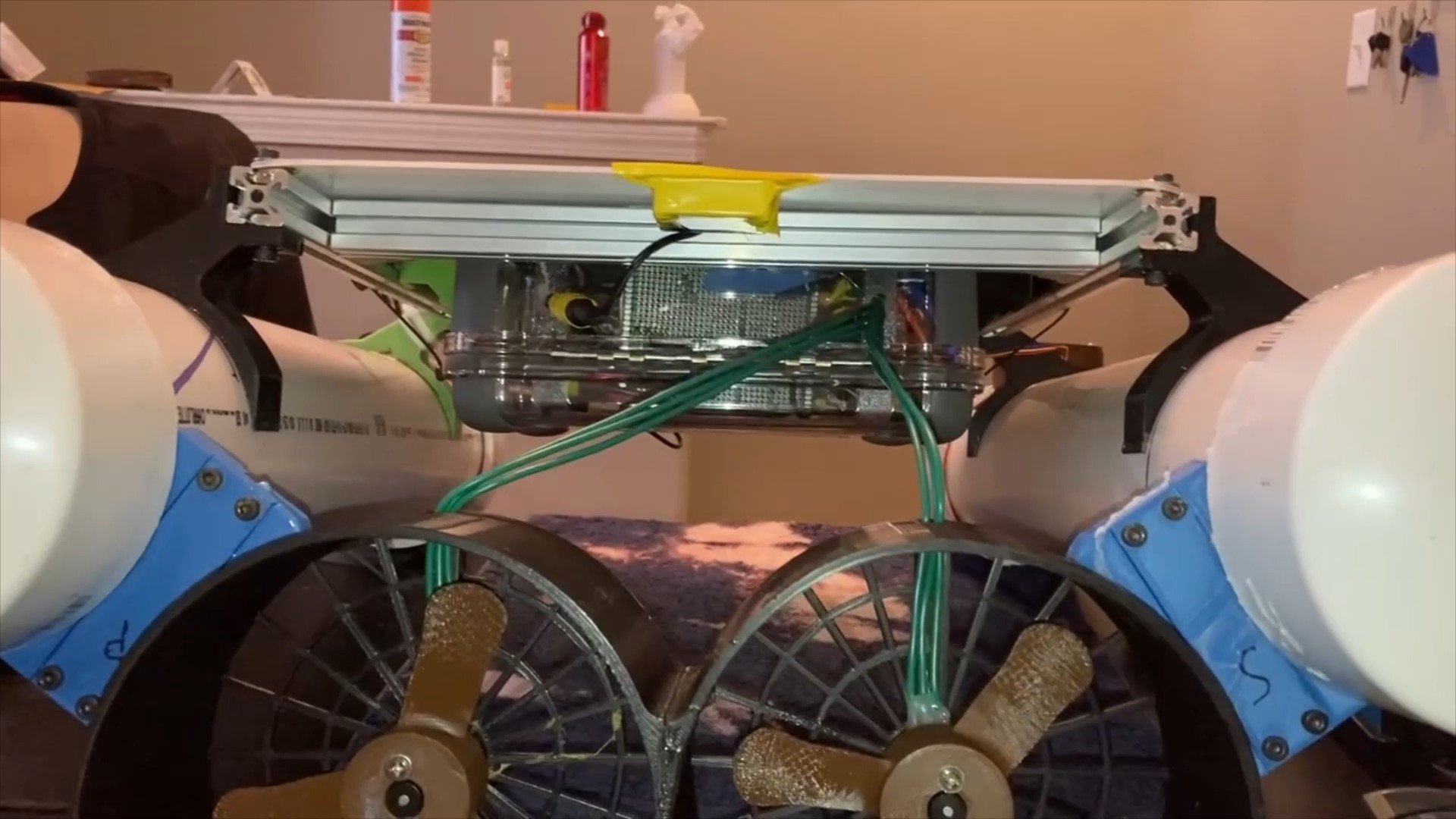
The vehicle includes a GPS module and magnetometer for navigation. It is driven by two brushless DC motors which are fully submerged, directly driving two propellers which I designed and 3D printed to steer with differential thrust. The boat reads waypoints of predetermined GPS coordinates from an SD card which it can also write data to. My code is running on an Arduino Pro Mini. I soldered a protoboard together to tie in all the various modules.
Project Video
Subsystem level testing was key to success for this project. It was a challenge to cohesively integrate multiple electromechanical systems with complex interactions. This video includes design information, testing, the first autonomous voyage, and failure diagnostics.














Wiring Schematic
Solar panel, charge controller, and battery not shown